

강좌 & 팁
안녕하세요. 조형깁니다 !
오늘은 로봇 Boss에 사용된 센서를 소개하도록 하겠습니다. Boss가 무슨 로봇이냐구요 ?
Boss는 2007년 Urban Challenge 대회를 우승하였던 CMU 의 차량 이름입니다. 어원은
원래 Boss라는 GM의 선구적인 자동차 엔지니어가 있었는데요, GM 이 주된 펀딩 소스였고
그래서 그 분을 기리고자 그렇게 지은 것 같습니다.
보스는 수많은 센서들의 집결체인데요, 총 13가지 종류의 센서들이 장착되어 있습니다.
차량 가격보다도 몇 배의 돈이 센서에 들어가는 꼴이 되니까요. ㅎ 대략적인 가격을 보시면
카메라 - 수 십만원
레이다 - 수 십만원
레이져 - 수 백만원
로컬라이징 센서 (applanix) - 수 백만원
벨로다인 - 수 천만원
뭐 이렇습니다.
자 그럼 보스의 사진을 보면서, 센서들을 간략히 소개하도록 하겠습니다.
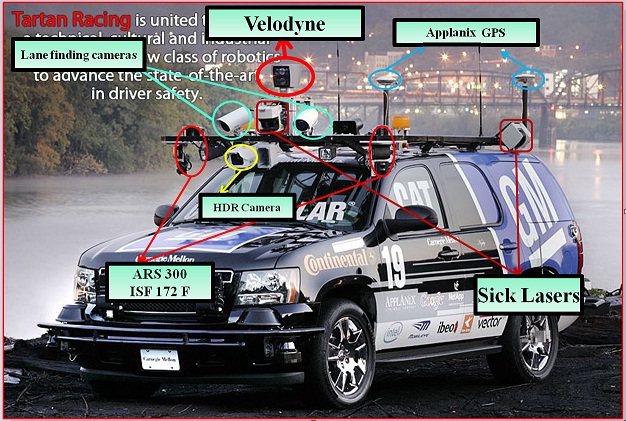
Velodyne 센서가 가장 꼭대기에 보이지요. 스트레오 셋팅의 firefly 카메라가 보이구요, HDR 카메라는 그냥 레코딩용으로
캠코더를 하나 장착해 놓은 것입니다. SICK 레이저 센서도 보이구요... ARS300 은 레이다 센서이구요. ISF 172F는 레이져
센서입니다. 같은 회사 제품이구요. (Contineltal ) . 두 제품을 한 축에 고정시키고 회전 가능하게 만들어서 원하는 센서
범위를 지정해 줄수 있도록 설계되었습니다. Applanix 네비케이션 시스템의 안테나가 뒤 쪽에 보이는군요...
벌써 타입으로는 4가지 종류로는 총 7개의 센서가 장착되어 있습니다.
차량 앞 쪽에 또 센서가 몇 가지 붙어 있습니다. 그림을 역시 보는게 낮겠죠.
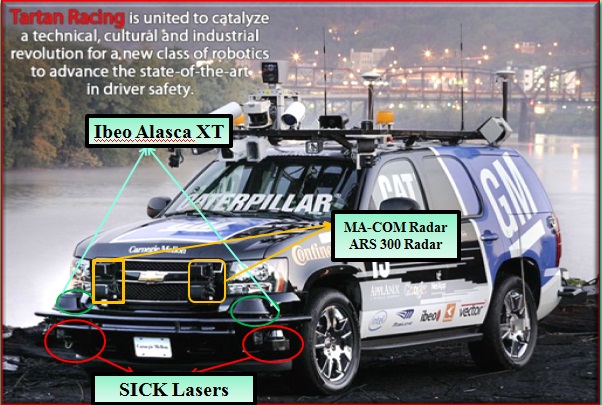
차량의 전방이 가장 중요한 field of view가 되기 때문에 많은 센서들이 앞을 지켜보게 있습니다. 레이져와 레이다가
차량의 앞의 다른 차량과 보행자등을 디텍션하고록 되어 있습니다. 보시면 많은 센서들이 중복되게 비효율적으로
달려 있는것 같은데, 실제 이런 센서들의 커버리지의 중복성이 굉장히 중요한 역할을 하게 됩니다. 퍼셉션 시스템이
로버스트하게 동작하는데... 또한 동잘의 센서 여러개의 사용해서 커버리지를 늘리려고 하는 구성도 보이구요...
보스에 사용된 모든 센서들의 테이블을 보시면 다음과 같습니다.
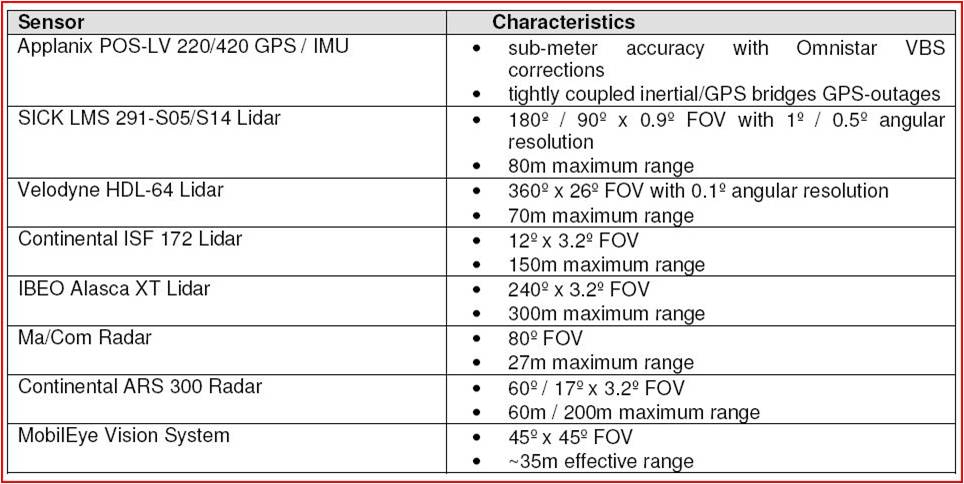
이 테이블에는 모빌아이사의 비젼 시스템도 들어가 있네요. 실제로 위 제품을 구매해서 테스트해 보기도 하였습니다. 허나 실제
대회에서는 모빌아이고 뭐고 아예 비젼 시스템을 전혀 사용하지 않았습니다. 음... 그만큼 비젼을 사용한 알고리즘들의 신뢰성을
믿기 어렵다는 것을 반증하는 것이기도 하지요. 어쨋든 비젼 시스템을 사용한 저희 고유의 레인 디텍션 트랙킹은 꽤나 정확하게
동작한다고 하였습니다.
저는 이런 센서 구성에서 비젼과 벨로다인 센서의 퓨젼을 생각하고 있습니다. 제가 생각하는 핵심 아이디어가 있는데,
그것이 저 두가지의 구성이라면 검증을 할 수 있을 것 같아서요... 각설하고....
지금까지 보스의 간략한 센서 소개였씁니다. 감사합니다.
제가 한 2주 정도 글을 적지 못할 것 같습니다. 뭐 지금도 그렇게 자주 적진 않지만요... 저의 박사 시험이 2주 앞으로
다가와서요... 시험 후에 다양하고 재미난 이야기로 다시 come back ! 하겠습니다.
