

하드웨어
요즘 스텝모터 제어회로 제작 할려고 공부하던중에 알게된 몇가지 정리해 봤습니다.
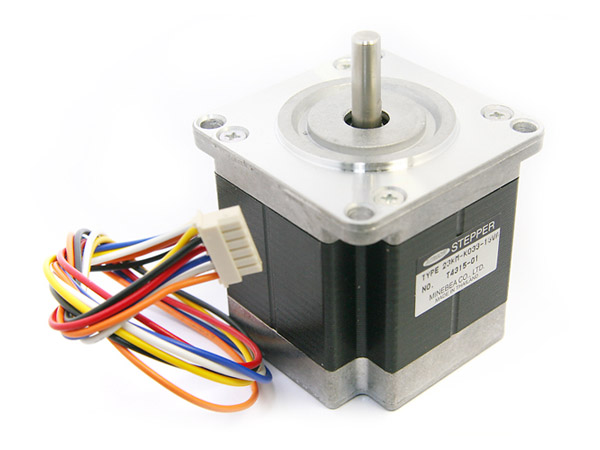
일단 스텝모터의 원리부터 잠깐 살펴보면
일정한 간격으로, 순간적으로 전류의 양을 변화시키는 펄스(pulse) 형태의 입력전류에 의하여 구동하는 모터입니다.
스텝모터의 장점으론
1) 입력 펄스 당 일정 각도만큼 로터가 회전하여 자동 제어가 쉽다는 점
2) 펄스 신호수에 비례한 만큼만 출력축이 회전하므로, DC 모터와는 달리 위치의 피드백이 불필요
3) 자기지지 토크가 형성되기 때문에 브레이크 기구가 없어도 자체의 위치결정 능력을 가지고 있는 점
4) 회전자에 영구 자석을 사용하면 무자력 상태에서도, 자기보지력(self-holding torque, detent torque)가 발생한다.
5) 고토크, 고속 응답, 소형 경량이다.
6) 미소각, 고정도, 저가격이다.
7) DC 모터의 브러쉬에 의한 기계적인 마찰로 인한 파손이 없기 때문에, 보수가 필요없다.
등이 있습니다.
스텝모터에는 다양한 종류는 인터넷에 많이 나와있으니 생략하고 제어를 위한 구동방식에 대해 알아보겠습니다.
스텝모터 구동 방식에는 크게 유니폴라구동, 바이폴라구동 방식이 있습니다.
구동방식역시 스텝모터의 기본적인 결선구조를 알아야 이해 할수 있기에 잠깐 살펴보자면
간략하게 아래 그림과 같이 내부결선 되어있습니다.
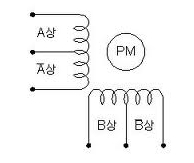
고정자에 여자권선이 처음으로 감긴형태의 코일부를 A상이라 하고
그 반대변을 /A상이라고 하고 A상과 /A상의 중간에 tap선이 있고
다른
고정자에 권선의 처음 감긴형태를 B상, 그 반대편을 /B상이라고 하고 B상 /B상 사이에도 tap선이 있습니다.
이렇게 탭선 까지 포함하면 총6선이 되는데요 유니폴라 구동방식으로 구동이 되고
탭선이 없으면 총4선이 되고 바이폴라 방식으로 구동 됩니다.
회로도를 보면 좀더 쉽게 이해가 되실겁니다
아래 그림의 왼쪽이 유니폴라 구동회로이고 오른쪽이 바이폴라 구동 회로 입니다.
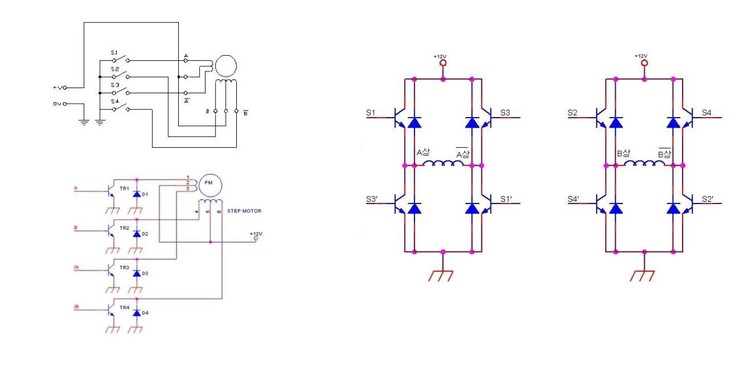
유니폴라는 좀어색하실지 모르겠지만 바이폴라 구동방식은
DC모터에서 많이 보시던 H브릿지 회로 2개로 구동되는걸 보실수 있습니다.
이회로를 어떻게 제어하느냐에 따라 스텝모터가 동작 하게 되는데요
나머지는 다음 시간에 좀더 자세히 알아보도록 하겠습니다.

좋은 정보 감사드립니다. 그런데 한가지 문의 드릴게 있습니다. 회로에서 H 브릿지를 사용한다고 하셨는데 이것은 어떤 역할을 하고 있는 것인지 문의 드립니다.
저는 개인적으로 이해하기를 역전류를 방지하기 위해서 다이오드를 달았다고 생각했는데 그게 아닌가보네요...