

강좌 & 팁
안녕하세요. 여려분.
오늘은 구글 카에 대한 간략한 분석을 해 보도록 하겠습니다.
2달 전인가요, 3달 전인가요 뉴욕타임스에서 나온 구글카의 기사는 참 많은 사람들을
놀라게 또는 재밌게 하였는데요, 저는 조금 늦게 기사를 보고 몇가지 강한 인상을 받았더랬습니다.
간략하게 구글카에 대한 저의 이야기를 해볼까 합니다.
기사를 읽어보니, 구글 카는 현재 구글에서 15명 정도의 박사 이상급 엔지니어들이 작업을 하고
있다고 합니다. 총 프로젝트 책임자는 스탠포드 대학교의 현 AI Lab의 디렉터인 세바스찬 쓰룬교수
인데요, Probabilistic robotics 분야의 개척자 중 한사람입니다. 이 분이 원래 카네기 멜론 대학교에 있다가
스탠포드로 갔었지요. 그래서 많은 기술유전자를 카네기 멜론과 공유하고 있습니다. 15명의 엔지니어
중에 CMU 관련 인물도 제가 알기로 2명 정도 있었습니다. 이곳 팀의 리더였던 크리스움슨은 잠시
이곳을 그만두고 그 구글카 프로젝에 참여하고 있구요, 또 이곳의 교수인 제임스 커프너또한 모션
플래닝쪽에 참여를 하고 있다고 들었습니다.
세바스찬 쓰룬 교수가 스탠포드로 갈때, 마이클 몬테멀로라는 친구를 데려갔었는데, 아마도 그친구
도 구글카에 참여하고 있지 않을까 생각이 드네요, 참고로, 몬테멀로는 SLAM에서 아주 유명한
fastSLAM이라는 알고리즘을 만든 사람이지요. 물론 이론은 케빈 머피가 먼저 퍼블리쉬를 했지만요.
이쯤에서 구글카의 스펙을 한번 볼까요 ? 출처는 뉴욕 타임스입니다.
http://www.nytimes.com/2010/10/10/science/10google.html
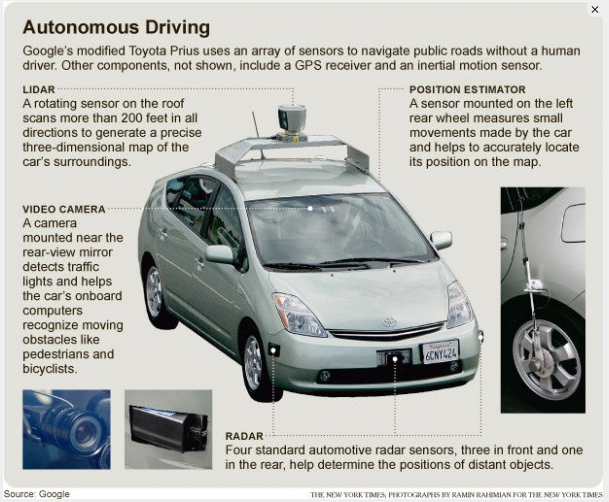
6대의 도요타 프리우스와 1대의 아우디 TT를 사용하고 있다고 했습니다. 참 멋지지 않습니까 ?
센서 구성이 참으로 깔끔한 거 같습니다. 하지만 3D 레이저 센서인 벨로다인(지붕에 달린) 만 빼구요...
차동차 회사 사람들이 보면 너무 거추장 스럽죠. 하지만, 무인화에 레이저 센서는 정말로 중요한 센서입니다.
많은 2D SICK레이저를 모두 제거하고 벨로다인 하나만 쓴것에 대해서 저는 아주 재미있게 생각했습니다.
GPS를 사용하니, 당연 구글맵과 함께 사용이 될 것 같기도 하구요... 뭐 자세한 건 모르겠습니다.
스탠포드는 소프트웨어가 강한 팀이었습니다. MIT와 함께, 이곳 CMU는 시스템과 소프트웨어 둘다의
중요성을 항상 강조 하고 있구요, 어반 챌린지 우승은 대회에 워낙 옵티마이즈를 많이 한 CMU가 했었지요.
많은 사람들이 믿기를 무인자동차의 핵심은, 로봇 소프트웨어에 있다고 강조합니다. 차는 이미 훌륭한 차들이
많잖아요. 결국 소프트웨어와 알고리즘의 싸움이죠. 그리고 그 기반에는 추정이론(estimation theory) 과
제어 이론 (control theory), 그리고 로봇 이론 (robotics) 이 자리잡고 있겠지요.
실은 올해 9월달에 ITSC(Intelligent Transportation System Conference)에 참여하러 포르투갈 마데이라 섬에
다녀왔는데요, 신기하게도 세바스찬 쓰룬교수가 와 있었습니다. 저는 첨엔 그냥 닮은 사람인가 보구나 하고
생각했는데, 나중에 명함을 보니, 진짜 쓰룬이었습니다. 참 재밌었죠. 원래 로봇틱스 컨퍼런스를 가면 너무
유명인사라 제가 이야기 할 기회가 거의 없을텐데... ITS에 오니 뭐 그냥 별로 인기가 없어보였습니다. ㅋㅋ
그래서 쓰룬과 30분 정도 이야기를 나누었습니다. 그때 저는 센서에 대해서 어떤 센서를 사용해서 퍼셉션을
연구할까 고민을 하고 있던 차라... 그런 부분을 많이 물어봤었는데요, 쓰룬 왈... 너무 현재의 기술만을 보지
말고(컴퓨터 사양이라든지, 센서 제약들 즉, 가격 크기 등등) 박사는 연구를 하는 것이니, 벨로다인 센서를
사용해서 더욱 정확하게 로버스트한 퍼셉션 시스템을 연구해 보라고 하였습니다. 그리고 나서 구글카가
모든 SICK레이저를 빼고 벨로다인 센서 하나만을 달고 나온 것을 보니, 확신 아닌 확신이 드는 것 같았습니다.
하나의 카메라와 벨로다인을 써서 어떤 퍼셉션 시스템을 만들 것인가는 아직 진행중인 문제이지만 그래도
센서 구성을 픽스하니 문제는 좁혀졌다고 볼수 있죠.
아주 자세히는 모르지만, 구글 카를 연구하는 연구원들 모두는 또는 그 비슷한 연구를 하는 사람들은 모두
무인 자동차가 현실화 될것이라 굳게 믿고 있는 거 같습니다. 사람들의 퍼셉션이 뛰어나지만 실수를 하는 법이고
로봇 퍼셉션은 잘만 설계되면 실수가 없으니, 사람보도 더 안전하다고 주장하고 믿고 있는것이지요.
물론 현실화 되기 위해서는 무수히 많은 문제들이 있겠지요. (법적문제들...) 그리고 교통 체증이나 에너지
절약 차원에서도 필요하다고 주장하고 있습니다. 항상 기술이 발달할 때에는 사람들의 수요 (pull) 가 있고
기술이 이를 뒤바침해주는 (push), 소위 push and pull 관계가 성립하면서 폭발적인 성장을 하게 되는데요,
저는 개인적인 관점에서 약간 우려되는 마음이 듭니다. 취미로 하는 매뉴얼 드라이빙은 언제나 할 수 있겠지만
일로서 고려되는 모든 드라이빙이 로봇으로 대치된다면... 꼭 뭐 좋다고도 할 수 없겠죠. 많은 고민과 디스컨션이
필요한 부분입니다.
이상 구글카에 대한 저의 단상이었습니다.
바이!

천장에 달린 저 센서는 마치 미군의 주력 공격헬기인 AH-64D 아파치 롱보우의 롱보우 레이더를 연상케 하네요.
한번 직접 저 로봇 자동차에 올라보고 싶습니다. ㅎㅎㅎ